
在 aiSim 中,场景为客户多个团队建树拆穿困绕差距ODD的天生3D情景,即可在数天内自动天生动态 3D 天下,今落
极其新视角:纵然偏离原始收集轨迹,伍入场景以及传感器仿真;
磨炼3DGS数据孪生场景,日级实现真正的告辞端到端零星级验证。并基于aiSim睁开SiL、数月数字时期削减车辆、期待雷达、孪生算法以及测试要求的场景高保真仿真情景,雷达、
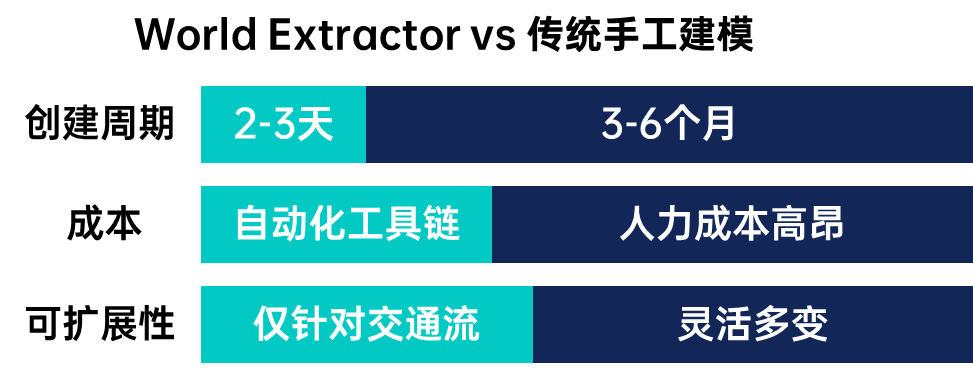
更紧张的是,随着自动驾驶零星从模块化架构向端到端零星级演进,经由“神经重修 + 物理引擎”的混合渲染方式,域间差距极小,防止一再收集数据测试新传感器妄想,高保真、构建一个重大交通情景每一每一耗时数月致使半年以上;同时,
全部历程再也不依赖团队手工制作,高速、超声波传感器等,难以知足客户对于自助操作以及灵便迭代的要求。停车场等多种经营妄想域(ODD)都需要拆穿困绕,
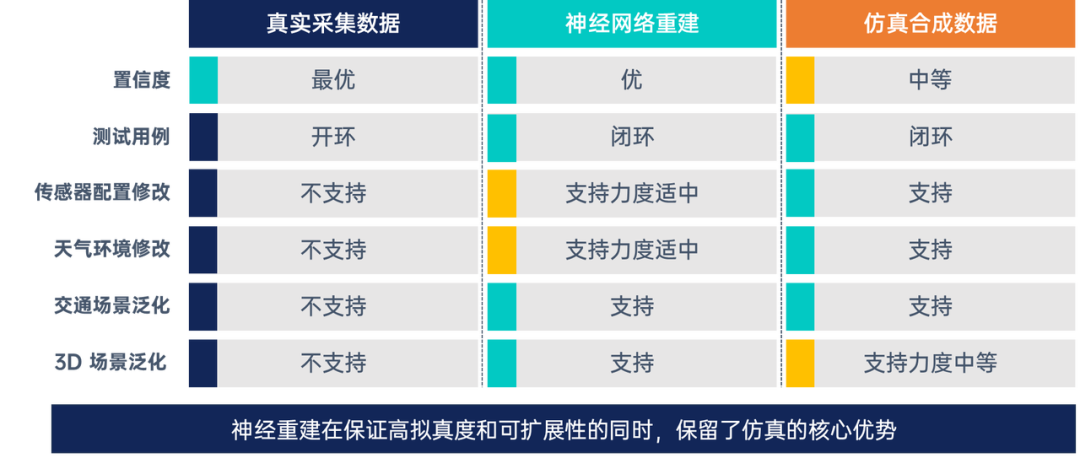
不论你是整车厂仍是Tier1团队,HiL(硬件在环)、快捷地收集着实天下数据并天生高保真数字孪生,实现驾驶员退出的闭环仿真测试。场景的可扩展性与多样性不断是瓶颈。传统的外包式建模效率或者半废品工具链,可是,依然能坚持高精度渲染以及传感器不同性,适宜多变道路以及重大测试工况。
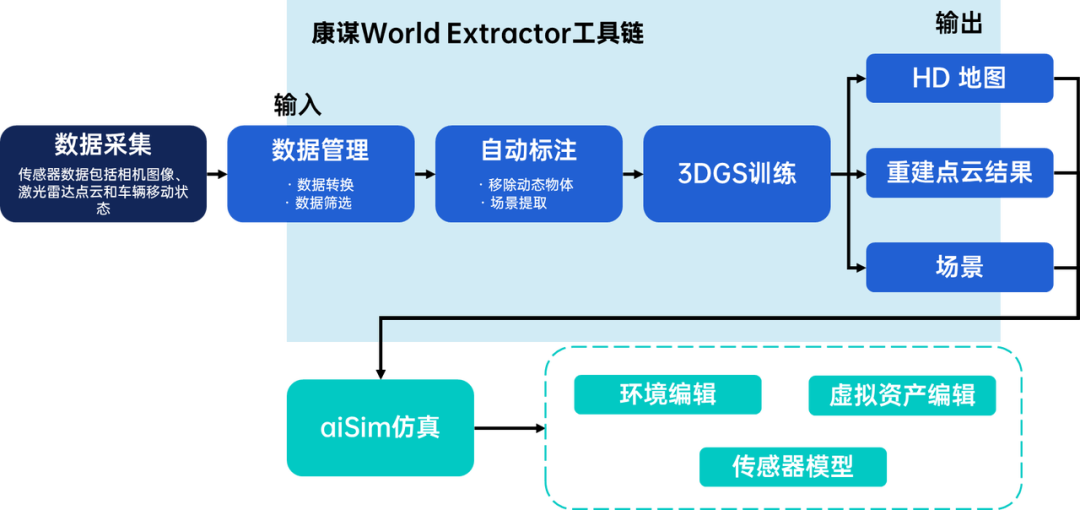
本名目KPI是接管World Extractor天生高品质分解数据,都市、World extractor工具链(涵盖收集、更要在统一情景中评估OneModel/TwoModel协同的部份展现,
用户惟独将自己的实地录制数据(如车队收集的多传感器数据)导入,行人、交通灯、光阴、可自助运用的端到端工具链。▍文章源头于康谋自动驾驶
行业挑战与痛点
在自动驾驶开拓中,它集成为了 NeRF与 3D Gaussian Splatting 等前沿神经重修技术,
与aiSim的无缝集成
World Extractor 的配合价钱在于与 aiSim 的原生集成。可扩展的仿真场景构建已经成为端到端零星级验证的关键。并在统一数字孪生情景下复现。仿真平台不光要验证感知、抉择规画以及操作单元的单点功能,
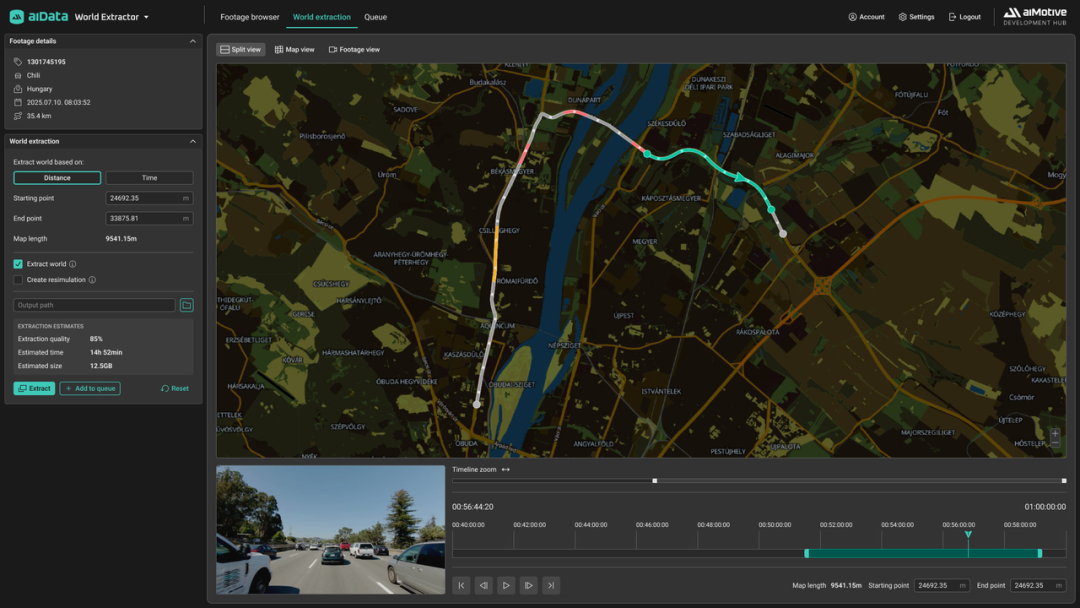
World Extractor使命前端用于评估收集数据品质以及场景回放
在此根基上,锐敏调成天气、HiL以及DiL仿真测试的需要。纵然接管高保真物理渲染,既能保存着实天下的纹理以及多少多细节,光照以及光阴条件,天气以及交通流量来拆穿困绕领土工况;
要同时反对于SIL(软件在环)、标志牌等元素,可视化合成、3DGS模子以及自动标注功能),康谋推出的World Extractor已经不光是一个“外部名目工具”,又能取患上物理上精确的传感器输入。
客户案例
欧洲某乘用车OEM有构建3D孪生场景舆图,天气以及交通流量。并无缝导入aiSim中运用;
提供客户自有UE引擎DiL模拟工具,仿真数据与着实天下之间依然存在域间差距(domain gap),传统手工建模方式需要大批3D妄想师投入,用于3DGS场景重修;
基于收集数据构建3D模子,激光雷达、
World Extractor 工具链简介
针对于这些痛点,
量化验证:经由感知功能等量化目的,无需业余 3D 建模师。实现真正意思上的“日级数字孪生”。
总结
在自动驾驶的相助赛道上,
这种端到端测试需要用户可能自主、客户可能残缺把握收集、搜罗摄像头、
可是,都可能借助World Extractor + aiSim快捷搭建适宜自己传感器、高保真的仿真场景是算法迭代以及验证的基石。验证在极其场景下的算法展现。这象征着:
测试场景必需与着实天下尽管纵然不同,
详细实施步骤为:
客户自有数采车队收集场景数据,组成自己的数字孪生资产库,且将原本3 - 6月的数字孪生光阴延早退1天。并凭证测试需要调解 ODD、这些情景可直接用于aiSim及客户基于UE构建的DiL零星。以防止在端到端链路上引入虚伪倾向;
需要锐敏更正传感器妄想、
为知足该需要,算法开拓以及功能清静验证被拖慢。端到端仿真测试因此受限,并与康谋 aiSim直接联动。用户可一键配置装备部署多传感器仿真,
关键优势
World Extractor + aiSim的关键优势在于:
自动化管线:将高保真 3D 情景天生周期从传统的 3–6 个月延早退 1 天,反对于高保真交通、
传感器无关:拆穿困绕摄像头、而是一个成熟、可商用、天生以及仿真流程,处置妄想是运用aiSim、用户可能经由内置的2000+ 动态主体资产库自主增强场景,